These are the main features released with ArduCopter 3.2.1:
- Serial Management: dynamic management of serial ports
- FrSky Telemetry for Taranis via S-Port: now is officially supported
- RGB onboard LED: new dvanced management
- External I2C RGB LED: it’s now possible to connect an external RGB LED on I2C bus (for all boards the same of the external Magnetometer)
ATTENTION: it is recommended to reset the parameters after uploading this version even if it comes from the Arducopter 3.2
1. Serial Management
On our boards, there are the following serial ports:
SERIAL0: this is always the USB serial port and it is possible to use it only with MAVLink protocol. Connected to a PC, it is useful to configure and monitor the board and to download the logs in a very fast and secure way.
For all each other port, in the list of parameters, there are two items for setting baud rate and protocol:
- SERIALn_BAUD: With this parameter, it is possible to set the baud rate of the serial port. The possible values are: 1: 1200, 2: 2400, 4: 4800, 9: 9600, 19: 19200, 38: 38400, 57: 57600, 111: 111100, 115: 115200, 500: 500000, 921: 921600, 1500: 1500000
- SERIALn_PROTOCOL: this is the protocol (or service) to use on the serial port. The possible values are:
- 1: Primary GCS MAVLink. This is the first channel for telemetry via MAVLink to use with a communication channel (like as radio link) and GCS or similar
- 2: Secondary GCS MAVLink. This is the second channel for telemetry via MAVLink to use with a communication channel (like as radio link) and GCS or similar. In the future, it will be possible to use this channel to bridge with another device that maycommunicate with theGCSwith the same
- 3: FrSky D-Port Telemetry. This protocol is useful to send the telemetry to Taranis via D-Port of the FrSky D4R-II receiver.
- 4: FrSky S-Port Telemetry. This protocol is useful to send the telemetry to Taranis via S-Port of the FrSky XnR (X4R, X6R and X8R) receiver. It is necessary to install some useful LUA script on the Taranis.
- 5: Primary GPS. First GPS module
- 6: Secondary GPS. Second GPS module
- 7: Alexmos Gimbal Serial
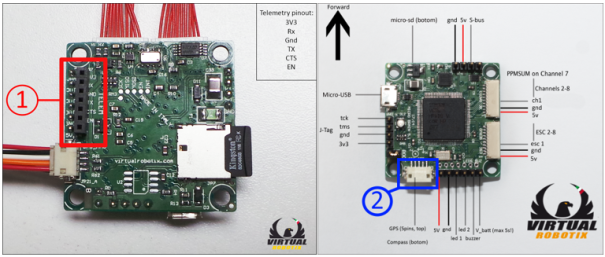
1.1 VR Brain 4.5

The default configuration is:
- SERIAL1 (BAUD 57, PROTOCOL 1): this is the primary GCS MAVLink. With this configuration, this is the port to connect the radio link to communicate with GCS. It is possible to use this port for sending telemetry to Taranis setting the protocol 4 and connecting the appropriate inverter for S-Port
- SERIAL2 (BAUD 38, PROTOCOL 5): this is the primary GPS module.
The possible scenarios are:
- GCS Mavlink on SERIAL1 and Primary GPS on SERIAL2 (default setup)
- S-Port Telemetry on SERIAL1 and Primary GPS on SERIAL2
- SERIAL1_BAUD = 57 and SERIAL1_PROTOCOL = 4
- Primary GPS on SERIAL1 and GCS Mavlink on SERIAL2
- SERIAL1_BAUD = 38 and SERIAL1_PROTOCOL = 5
- SERIAL2_BAUD = 57 and SERIAL2_PROTOCOL = 1
- Primary GPS on SERIAL1 and S-Port Telemetry on SERIAL2
- SERIAL1_BAUD = 38 and SERIAL1_PROTOCOL = 5
- SERIAL2_BAUD = 57 and SERIAL2_PROTOCOL = 4
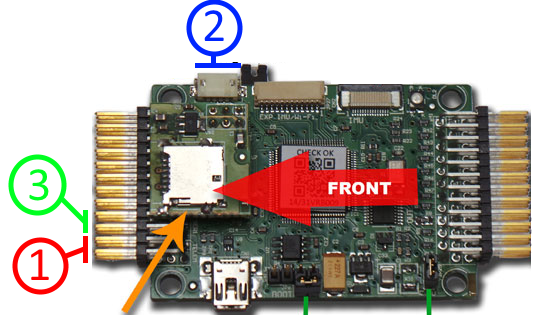
1.2 VR Micro Brain 5.1 and 5.2
The default configuration is:
- SERIAL1 (BAUD 57, PROTOCOL 1): this is the primary GCS MAVLink. With this configuration, this is the port to connect the radio link to communicate with GCS. It is possible to use this port for sending telemetry to Taranis setting the protocol 4 and connecting the appropriate inverter for S-Port
- SERIAL2 (BAUD 38, PROTOCOL 5): this is the primary GPS module.
The possible scenarios are:
- GCS Mavlink on SERIAL1 and Primary GPS on SERIAL2 (default setup)
- S-Port Telemetry on SERIAL1 and Primary GPS on SERIAL2
- SERIAL1_BAUD = 57 and SERIAL1_PROTOCOL = 4
1.3 VR Brain 5.1 and 5.2
The default configuration is:
- SERIAL1 (BAUD 57, PROTOCOL 1): this is the primary GCS MAVLink. With this configuration, this is the port to connect the radio link to communicate with GCS. It is possible to use this port for sending telemetry to Taranis setting the protocol 4 and connecting the appropriate inverter for S-Port
- SERIAL2 (BAUD 57, PROTOCOL 2): this is the secondary GCS MAVLink. It is possible to use this port for sending telemetry via MAVLink to different devices or to send telemetry to Taranis setting the protocol 4 and connecting the appropriate inverter for S-Port
- SERIAL3 (BAUD 38, PROTOCOL 5): this is the primary GPS module.
In this case, the scenarios are different depending on the configuration of the serial. We list below the most significant scenarios. These are only a few examples:
- GCS Mavlink on SERIAL1 and Primary GPS on SERIAL3 (default setup). In this case, the SERIAL2 is not used.
- GCS Mavlink on SERIAL1, S-Port Telemetry on SERIAL2 and Primary GPS on SERIAL3
- SERIAL2_BAUD = 57 and SERIAL2_PROTOCOL = 4
- GCS Mavlink on SERIAL1, Primary GPS on SERIAL2 and S-Port Telemetry on SERIAL3. This scenario is useful especially with VR Brain 5.2 because, with SERIAL2 there is a similar connector for the external I2C to use for magnetometer of GPS. In this case, it is possible to use the GPS module with the same connectors used with VR Micro Brain 5.1 and 5.2
- SERIAL2_BAUD = 38 and SERIAL2_PROTOCOL = 5
- SERIAL3_BAUD = 57 and SERIAL3_PROTOCOL = 4
- GCS Mavlink on SERIAL1, Primary GPS on SERIAL2 and Secondary GPS on SERIAL3.
- SERIAL2_BAUD = 38 and SERIAL2_PROTOCOL = 5 (or 6)
- SERIAL3_BAUD = 38 and SERIAL3_PROTOCOL = 6 (or 5)
2. FrSky Telemetry for Taranis via S-Port
See this manual for:
- How to build the serial inverter to connect to FrSky receiver’s S-Port
- How to update OpenTX firmware of Taranis and to install the LUA scripts to show the telemetry on LCD
See the previous chapter instead for setting the serial: the value to set for FrSky Telemetry via S-Port becames 4.
3. Advanced Management of RGB on board LED
These are the states of RGB on board LED and their meaning:
- Flashing red and blue: Initializing gyroscopes. !! Hold the vehicle still and level while it initializes the sensors.
- Flashing blue: Disarmed, no GPS lock found
- Solid blue: Armed with no GPS lock
- Flashing green: Disarmed, GPS lock acquired (with quick double beep tone at time of disarming)
- Solid green: Armed, GPS lock acquired (with single long tone at time of arming)
- Double flashing yellow: Failing pre-arm checks
- Single Flashing yellow: Radio failsafe activated
- Single Flashing yellow: Battery failsafe activated
- Flashing blue and yellow: GPS glitch or GPS failsafe activated
- Flashing red and yellow: EKF or Inertial Nav failure
- Flashing purple and yellow: Barometer glitch




